Affine transform.
More...
#include "affine.hpp"
|
| | Affine3 () |
| |
| | Affine3 (const Mat4 &affine) |
| | Augmented affine matrix. More...
|
| |
| | Affine3 (const Mat3 &R, const Vec3 &t=Vec3::all(0)) |
| | Rotation matrix. More...
|
| |
| | Affine3 (const Vec3 &rvec, const Vec3 &t=Vec3::all(0)) |
| | Rodrigues vector. More...
|
| |
| | Affine3 (const Mat &data, const Vec3 &t=Vec3::all(0)) |
| | Combines all contructors above. Supports 4x4, 4x3, 3x3, 1x3, 3x1 sizes of data matrix. More...
|
| |
| | Affine3 (const float_type *vals) |
| | From 16th element array. More...
|
| |
| template<typename Y > |
| Affine3< Y > | cast () const |
| |
| Affine3 | concatenate (const Affine3 &affine) const |
| | a.concatenate(affine) is equivalent to affine * a; More...
|
| |
| Affine3 | inv (int method=cv::DECOMP_SVD) const |
| |
| void | linear (const Mat3 &L) |
| |
| Mat3 | linear () const |
| |
| template<typename Y > |
| | operator Affine3< Y > () const |
| |
| Affine3 | rotate (const Mat3 &R) const |
| | a.rotate(R) is equivalent to Affine(R, 0) * a; More...
|
| |
| Affine3 | rotate (const Vec3 &rvec) const |
| | a.rotate(rvec) is equivalent to Affine(rvec, 0) * a; More...
|
| |
| void | rotation (const Mat3 &R) |
| | Rotation matrix. More...
|
| |
| void | rotation (const Vec3 &rvec) |
| | Rodrigues vector. More...
|
| |
| void | rotation (const Mat &data) |
| | Combines rotation methods above. Suports 3x3, 1x3, 3x1 sizes of data matrix;. More...
|
| |
| Mat3 | rotation () const |
| |
| Vec3 | rvec () const |
| | Rodrigues vector. More...
|
| |
| Affine3 | translate (const Vec3 &t) const |
| | a.translate(t) is equivalent to Affine(E, t) * a; More...
|
| |
| void | translation (const Vec3 &t) |
| |
| Vec3 | translation () const |
| |
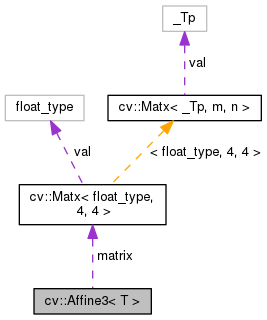
template<typename T>
class cv::Affine3< T >
Affine transform.
- Todo:
- document
Combines all contructors above. Supports 4x4, 4x3, 3x3, 1x3, 3x1 sizes of data matrix.
template<typename T>
template<typename Y >
a.concatenate(affine) is equivalent to affine * a;
Create identity transform.
template<typename T>
template<typename Y >
a.rotate(R) is equivalent to Affine(R, 0) * a;
a.rotate(rvec) is equivalent to Affine(rvec, 0) * a;
Combines rotation methods above. Suports 3x3, 1x3, 3x1 sizes of data matrix;.
a.translate(t) is equivalent to Affine(E, t) * a;
The documentation for this class was generated from the following file:
- core/include/opencv2/core/affine.hpp


 1.8.11
1.8.11